IH2VOF solves the two-dimensional wave flow for hybrid domains in a coupled NS-type equation system, at the clear-fluid region (outside the porous media) and inside the porous media by the resolution of the Volume-Averaged Reynolds Averaged Navier-Stokes (VARANS) equations. Turbulence is modelled using a k-ε model for both the clear-fluid region and the porous media region.
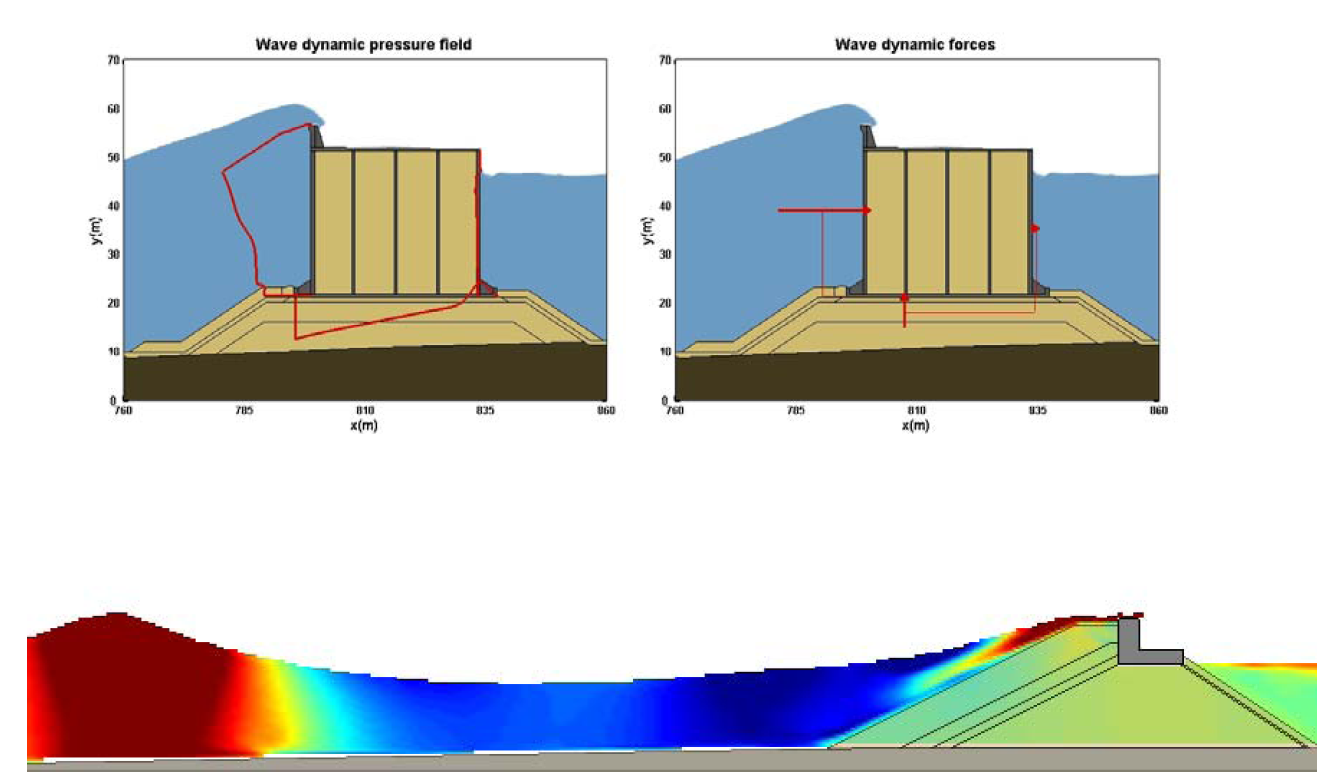
IH2VOF is one of the most advanced RANS models thanks to its capabilities, robustness and extensive validation for both surf zone hydrodynamics and the stability and functionality of conventional or non-conventional coastal structures . Realistic wave generation, second order generation and active wave absorption are some of the unique features included in the model.
IH2VOF training courses can also be provided on demand. More details.
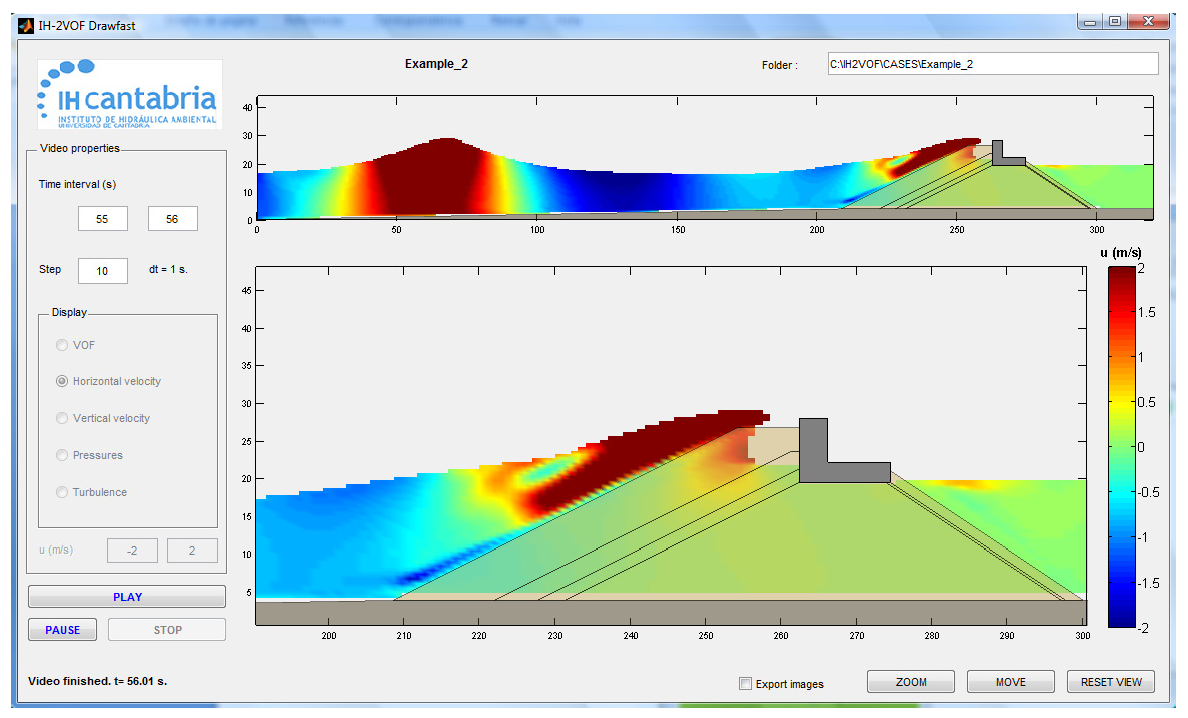
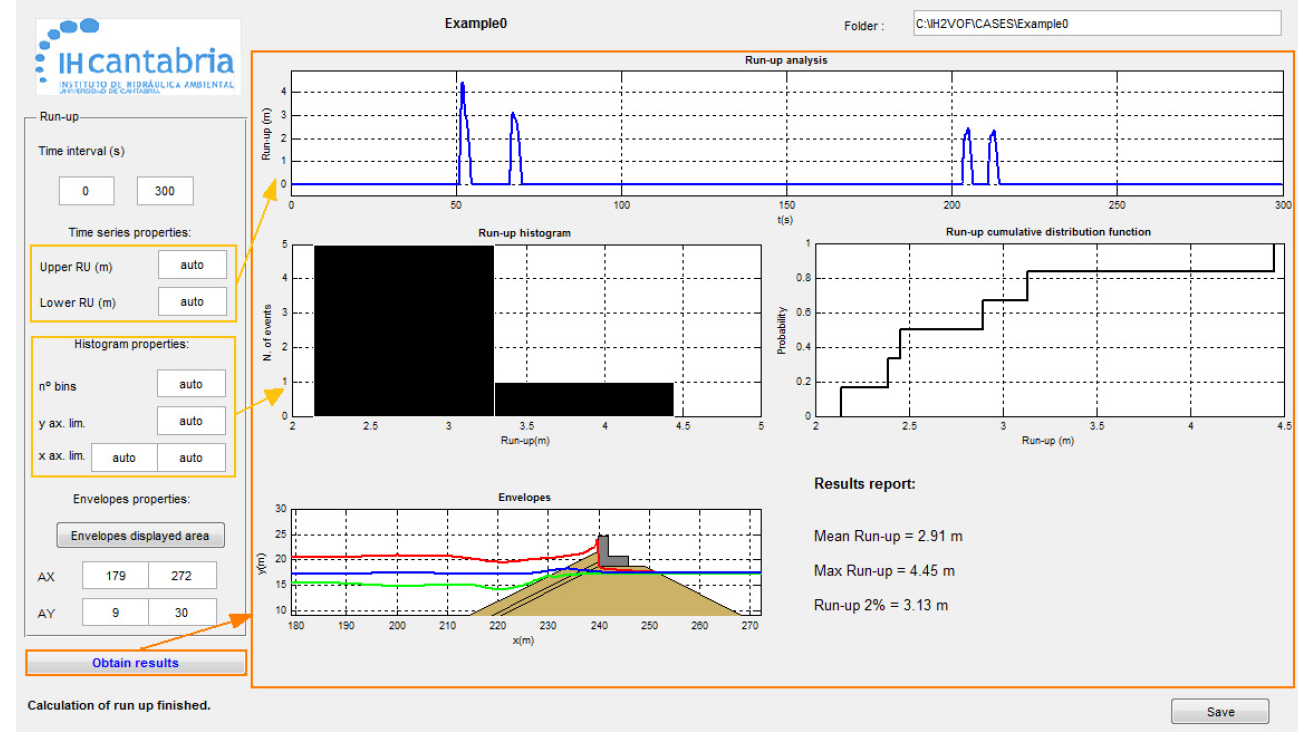
The model includes a Graphical User Interface with a mesh generator and pre-processing and post-processing tools.